
- Version
- Download 41
- File Size 64.91 KB
- File Count 1
- Create Date February 21, 2026
- Last Updated July 25, 2026
A CANBUS profile for Wireshark
CAN bus (Controller Area Network) is a robust, multi-master, message-based serial communication protocol used primarily in vehicles and industrial systems to allow Electronic Control Units (ECUs) to communicate over a shared two-wire differential bus without a central host. It was developed by Robert Bosch GmbH in the 1980s for automotive applications and later standardized as ISO 11898.
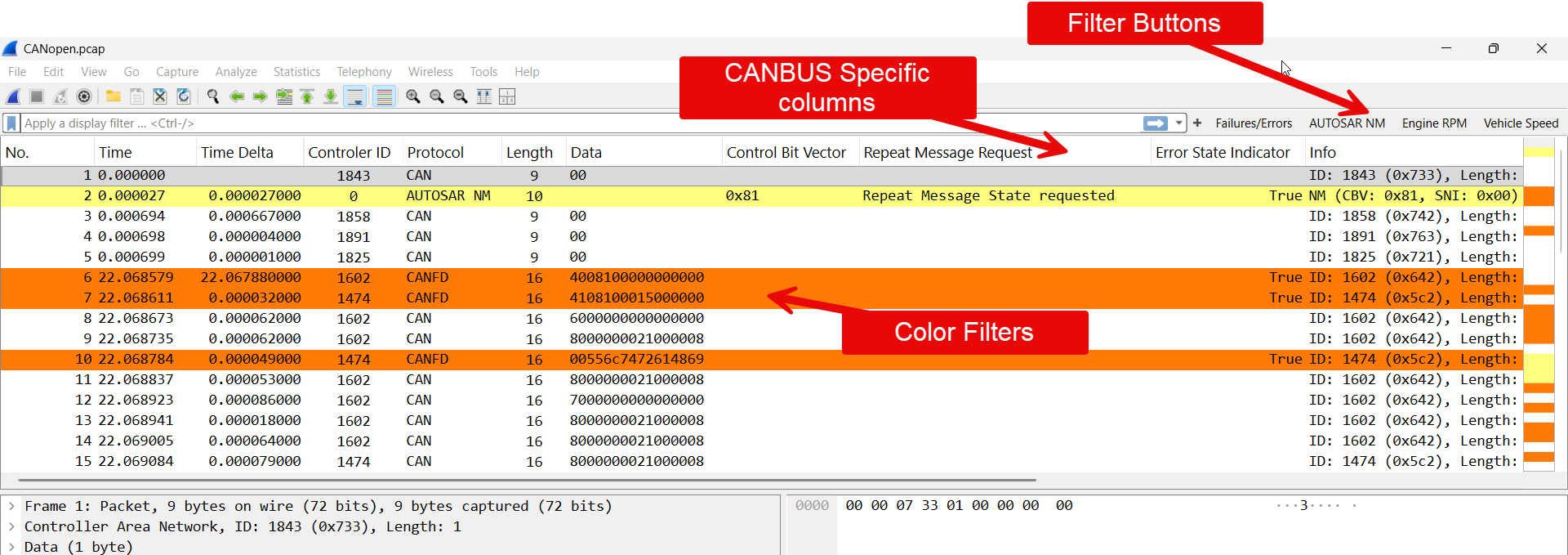
This is a CANBUS Profile for Wireshark.
Some notes: CAN does not use source/destination MAC addresses like Ethernet. Instead it uses the following:
-
Messages contain an identifier (ID)
-
The ID defines priority and meaning
-
Any ECU can subscribe to relevant IDs
Example:
-
ID 0x0CFF0500 → Engine RPM
-
ID 0x18FEEE00 → Vehicle speed
If you have a background in broadband and protocol troubleshooting:
-
Think of CAN ID like a deterministic priority queue
-
Think of DBC like a MIB
-
Think of error frames like Layer 1/2 faults
-
Think of arbitration like hardware-based QoS
-
Think of CAN FD like moving from T1 framing to Fast Ethernet in capability jump
The decoding mindset is identical to Wireshark:
-
Identify the frame
-
Determine priority
-
Interpret payload
-
Look for errors
-
Correlate timing patterns
Did you find this useful? Would you change or modify this file in any way? Let us know - you can leave comments at our Discord server.
If you would like to see more content and articles like this, please support us by clicking the patron link where you will receive free bonus access to courses and more, or simply buying us a cup of coffee!